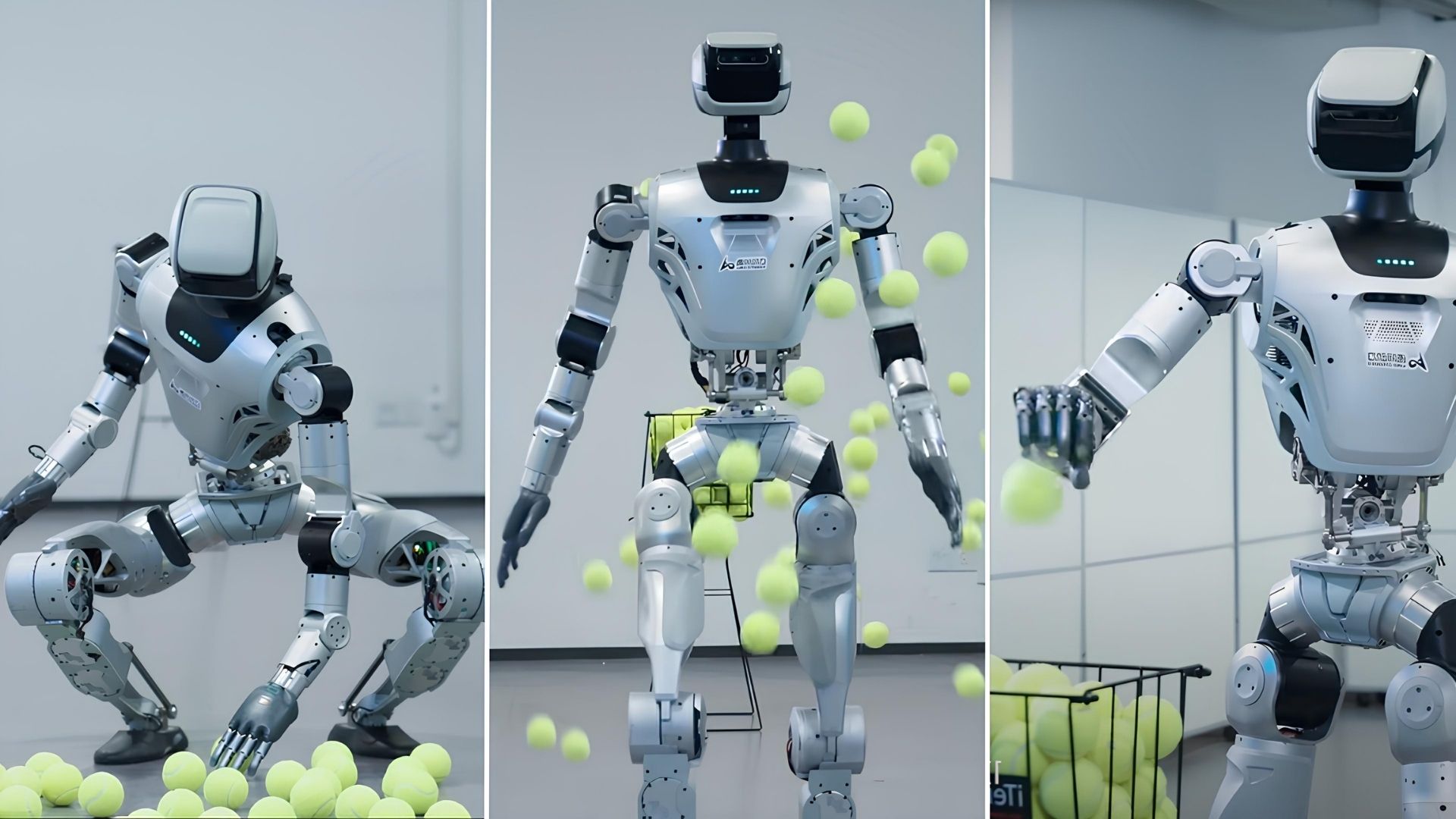
China Develops Humanoid Robot Capable of Picking Up a Tennis Ball
China has successfully developed a humanoid robot that demonstrates the capability to pick up a tennis ball. This advancement marks a significant step in the field of robotics, particularly in developing machines with refined motor skills and dexterity.
Dexterity and Manipulation Capabilities
The robot's ability to precisely grasp and manipulate a small, relatively light object like a tennis ball highlights advancements in its robotic hand and arm design. This level of dexterity is crucial for robots intended for tasks requiring fine motor control, such as assembly, delicate handling of objects, or assisting in complex operations. The successful retrieval of the tennis ball suggests progress in the robot's sensor fusion and control systems, enabling it to accurately perceive and interact with its environment.
Potential Applications and Future Development
The development of a humanoid robot with such refined manipulation skills opens doors to a wide range of potential applications. These could include roles in manufacturing, logistics, healthcare, or even domestic assistance where interacting with everyday objects is necessary. While the current achievement focuses on a specific task, it lays the groundwork for further research and development into more complex robotic interactions and autonomous capabilities. Continued progress in this area could lead to robots that are more integrated into human environments and capable of performing a broader spectrum of tasks.
In summary, a newly developed humanoid robot from China has demonstrated the capacity to pick up a tennis ball. This achievement showcases progress in robotic dexterity and manipulation, with potential implications for various future applications across different industries.